
|
|||||||
|
|||||||
|
||||||
|
||||||
|
||||||||||||
|
||||||||||||
|
|||||||||
|
|||||||||
|
|||
|
|||
|
|||||||||
|
|||||||||
|
||
|
||
|
|||||
|
|||||
|
||
|
||
|
|||
|
|||
|
|||
|
|||

上海中人专业提供ZRJQR-XC工业机器人编程及系统集成实训台,是专业的教学FB体育·(中国)官方网站生产厂家,我们欢迎您来我们生产基地考察ZRJQR-XC工业机器人编程及系统集成实训台,并为您提供专业的解决方案。教学FB体育·(中国)官方网站可以解决教师教学缺少平台,学生缺少实操经验的难题。ZRJQR-XC工业机器人编程及系统集成实训台,是中人公司的品质效益保障教学产品。 文章内容中的图片为参考图片,仅供参考,以实物为准.
本文关键词:ZRJQR-XC工业机器人编程及系统集成实训台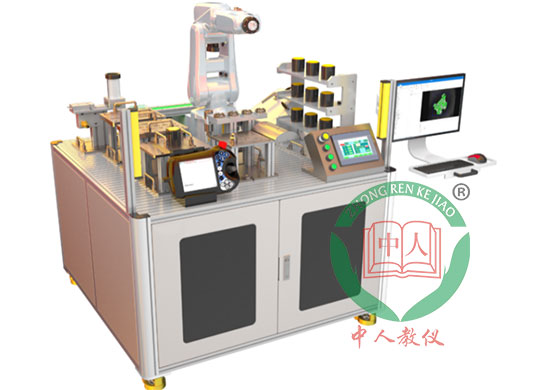
1.1.产品基本要求
符合1+X工业机器人应用编程的技术标准,也支持机器人系统集成。采用模块化设计,硬件配置可升级,由工业机器人、实验平台、快换工装夹具、轨迹与绘图模块、搬运模块、码垛模块、装配模块、输送线模块、井式落料模块、仓储模块、变位机模块、PLC电气控制模块、通用电气接口模块、FB体育·(中国)官方网站监控摄像头、气源模块、工业机器人仿真软件等组成。配套提供的项目化教学资源,实验项目不仅能在硬件实验平台完成,也可以在机器人仿真软件的虚拟实验台上完成。
1.2.产品技术参数
1、机台尺寸:1200mm*1200mm*1500mm;
2、工作电源:单相三线制,AC220V±5%,50HZ;
3、安全保护:漏电保护,过流保护,短路保护;
4、额定功率:≤2KW;
1.3.产品配置介绍
1.3.1.工业机器人(abb)
(1)机器人本体
配置3Kg级的工业机器人,IRB120 3/0.6型。机器人技术参数如下:
1.工业机械手工作半径:≥580mm,有效荷重:≥3kg;
2.轴数:6轴;
3.机器人各关节转动范围及最大动作速度:轴1:-165°~+165°,250°/s;轴2:+110°~-110°,250°/s;轴3:+70°~-90°,250°/s;轴4:+160°~-160°,320°/s;轴5:+120°~-120°,320°/s;轴6:+400°~-400°,420°/s;
4.机械手重量:≤25kg;
5.位置重复精度:≤0.01mm;
6.本体防护等级:IP30,电控柜防护等级:IP20
7.集成信号源:手腕设10路信号线路,集成气源:手腕设4路气路
8.控制器:IRC5紧凑型
(2)机器人控制器:
采用IRC5紧凑型控制器,主要参数:
1.尺寸:高×宽×深: 310mm×449mm×442mm(±5mm);
2.电气连接:电源电压:单相220/230v,50-60Hz;
3.防护等级:IP20;
4.环境参数:环境温度0-45度,相对湿度:最高95%(无凝霜);
5.控制器最强大功能浓缩于紧凑的机柜内,节省空间,单相电源变于调试,预设所有信号的外部接口,内置可拓展不小于16路输入/16路输出I/O系统,可扩展机器视觉等多种外围FB体育·(中国)官方网站。
6.机器人控制系统软件必须基于WINCE平台,以便基于机器人的二次开发。机器人控制系统原配固态存储器容量不得低于1G,并支持USB扩展为副存储器。
(3)工业机器人示教器:
1.支持手动操纵、程序编写、参数配置及监控;
2.大于6.5寸LCD显示屏;
3.具备紧急停机功能;
4.具备3位启动开关(双回路);
5.具有手动操作杆,快换定位;
6.防护等级:IP54
7.具有12键薄膜键盘;
8.支持热插拔;
9.具有数据备份与恢复用USB接口1个;
1.3.2.操作实验平台
机器人操作实验平台承重主体为铝型材拼接而成,侧封板为钣金材料,预留有标准气源和电气接口安装位置。台面有用铝型材,通过T型螺丝安装,平台上可牢固安装多种多功能多应用模块,平台预设有定位块,以方便各个多功能多应用模块的定位、安装和固定,实现模块快速的自定义位置安装。外形尺寸:1200mm×1200mm×830mm。
操作平台上安装光栅安全防护措施,电气控制模块配置急停按钮,保证FB体育·(中国)官方网站运行时的人员安全问题。
1.3.3.快换工具模块
快换采用台湾星塔品牌,包括1个机器人侧工具盘和4个工装侧工具盘,负载为5KG。快换工具模块由快换固定底板、快换支架等组成。根据不同的实训目标和操作对象,提供多种不同的快换工具,放置带有定位和检测功能工具支架上,可根据不同的实训需求增加模块以及工具的种类和数量。标配的机器人末端工具有:单吸盘工具、可伸缩柱状工具、爪手工具、打磨工具。可伸缩柱状工具带弹簧缓冲,受力会向上顶起,并可更换具体的工具。
(1)快换支架技术参数:
1.外形尺寸(长×宽×高):250mm×120mm×180mm(±5mm)
2.容量:4个快换工具
(2)快换盘技术参数:
1.快换装置材质:本体材质铝合金,紧锁机构合金钢
2.承重:5kg
3.允许力矩:20N·m
4.工作压力:0.3-1MPa
5.重量:0.5kg
(3)单吸盘工具技术参数:
1.吸盘盘径:20mm(±2mm)
2.吸附力10N,配真空发生器和电磁阀
(4)爪手工具技术参数:
1.气缸缸径:8mm
2.行程:15mm
(5)打磨工具
1.直流静音无级调速电机,电压9-24V
2.万能夹头0-4mm
(6)可伸缩柱状工具
1.工具类型:绘图笔工具,TCP针尖,可手动更换工具
2.可伸缩柱状工具带弹簧缓冲,受力会向上顶起
1.3.4.轨迹与绘图模块
模块采用磁性设计,可黏贴不同的图案。标配图案的主要练习功能:机器人TCP操作、工件坐标操作、运动指令示教与编程操作(直线、平面曲线、空间曲线、运动过渡半径等操作)。把机器人TCP针尖更换为画笔,可以绘图纸上进行绘图操作。主要技术参数:
1.外形尺寸(长×宽×高):250mmX200mmX180mm
2.TCP针尖:支持
3.图形:直线、平面曲线、空间曲线、运动过渡半径等操作
1.3.5.搬运模块
搬运操作模块主要由固定底板、搬运料块等组成,搬运料块分为3种形状,每种形状3种不同色彩。工件先放在物料板上,工业机器人通过选择对应工具,实现不同形状物料的搬运,把工件放到物料板对应的仓格上,物料板满足平面,阵列搬运要求,使用方法多样。主要技术参数:
1.外形尺寸(长×宽×高):250mmX200mmX182mm。
2.物料类型:三角形、圆形、正方形
3.物料颜色:红、绿、黄
1.3.6.码垛模块
码垛模块主要由码垛固定底板、码垛面板、工件等组成。共有2种不同尺寸的工件。工业机器人通过吸盘工具按要求拾取码垛零件进行码垛任务,能练习对工业机器人码垛的理解并快速编程示教的强化训练。根据要求码垛零件被摆放到底板相应仓格内,机器人通过吸盘工具按要求拾取码垛零件进行码垛任务,可根据需要自由组合码垛出多种形状。主要技术参数:
1.外形尺寸(长×宽×高):250mmX200mmX182mm;
2.物料尺寸:25mm*25mm 8块,25mm*50mm 4块;
1.3.7.装配模块
由固定底板、定位块,夹紧气缸等组成。通过夹紧气缸对工件固定,训练对工业机器人精确定位使用的学习。主要技术参数:
1.外形尺寸(长×宽×高):250mmX200mmX205mm;
2.双轴气缸行程:50mm;
3.V型块固定夹持范围:φ30mm~φ65mm;
1.3.8.输送线模块
输送线模块主要由皮带输送机、固定底板等组成。皮带输送机由铝合金型材搭建而成,采用单相交流调速电机驱动。输送机上安装光电传感器与阻挡装罝,用以检测与阻挡工件。调速电机驱动皮带,运输零件,传送带有启停和调速功能。模块适配标准电气接口套件。主要技术参数:
1.外形尺寸(长×宽×高):610mm * 124mm * 162mm;
2.输送机长度:600mm;
3.有效工作宽度:54mm;
4.最高速度:≥4m/min;
5.控制电压:DC24V;
6.调速器:电压:单相AC220V,频率:50/60Hz,调速范围:90-3000r/min;
1.3.9.井式落料模块
主要由井式供料机、固定底板、传感器等组成。用于储存多种零件,通过气动推头进行供料,模块适配标准电气接口套件。机器人或PLC通过数字量输入输出控制,完成零件的供料,料仓监控和推头的控制。可以与其他模块进行组合,实现不同的实训任务。主要技术参数:
1.外形尺寸(长×宽×高):265mmX120mmX325mm;
2.有机玻璃管长::100mm;
3.驱动气缸行程::75mm;
1.3.10.仓储模块
主要由固定底板、立体仓库、检测传感器等组成。每个库位都有检测传感器,通过传感器信号检测,把数据传输到PLC控制器。PLC与机器人通过总线通信。机器人实时读取PLC的库位信息,进行工件的出库入库。主要技术参数:
1.外形尺寸(长×宽×高):360mm×150mm×400mm;
2.适配标准实训台定位安装;
3.仓储容量:9;
4.兼容工件种类:2种;
5.以太网I/O采集模块,通讯协议:Modbus-TCP;
1.3.11.变位机模块
主要由变位机、固定底板等组成。模块适配外围控制器套件和标准电气接口套件,将变位机扩展为机器人第7轴,该模块可以与其他功能模块组合使用,如安装打磨模块。掌握伺服系统在工业机器人中的应用和控制方法。主要技术参数:
1.外形尺寸(长×宽×高):570mm×254mm×310mm;
2.适配标准实训台定位安装;
3.行程:±45°;
4.速度范围:10~30°/s;
5.驱动方式:交流伺服+行星减速机;
6.行星减速机的减速比≥9;
7.伺服电机功率≥100W;
8.伺服驱动PLC控制:脉冲/方向控制;
9.工作平台:打磨模块;
1.3.12.电气控制模块
包括PLC控制器及人机界面。控制器采用模块化、紧凑型设计,可扩展,具有标准工业通信接口,适用于实现简单逻辑控制、高级逻辑控制、网络通信与控制应用,通过工业通信网络与机器人通信。支持对PLC二次开发与电气系统集成。
(1)控制器采用西门子S7-1200,主要技术参数:
1.工作存储器:75KB;
2.装载存储器:4MB;
3.保持性存储器:10KB;
4.数字量:14DI/10DO、模拟量:2AI;
5.位存储器(M区):8192字节;
6.高速计数器:6路;
7.脉冲输出:4路;
8.以太网端口数:1个;
9.通信协议支持:PROFINET、TCP/IP、SNMP、DCP、LLDP、ISO-on-TCP、UDP、Modbus、S7等通信协议,PROFIBUS、AS接口通信扩展可支持;
10.数据传输率:10/100Mb/s;
11.布尔运算执行速度:0.08μs/指令;
12.移动字执行速度:1.7μs/指令;
13.实数数学运算执行速度:2.3μs 指令;
(2)人机界面主要技术参数:
1.显示屏≥7英寸的 TFT 显示屏,16777216 色;
2.分辨率≥800×480 像素;
3.操作方式:触摸屏;
4.背光无故障时间:80000H;
5.用户内存:12MB;
6.电压额定值:DC24V;
(3)操作按键:急停、开始,停止,告警。
1.3.13.通用电气接口模块
电气接口模块安装于标准实训台电控板上,包括:7组电气专用接口,3组通用电气接口,6个网络接口。通过航空插头线缆与各有源功能模块进行连接,实现FB体育·(中国)官方网站主控与各模块之间的供电及通讯。
(1)电气接口总体技术要求:
1.同类型航空插头线缆通用;
2.不同类型接口防呆保护;
3.接口插座带机械位置保护;
4.接口通过航空插头电缆进行连接;
5.航空插头芯数≥6芯,航空插头直径≥12mm;
(2)专用电气接口技术要求:
1.传输线模组电气接口技术参数:一组控制信号航空插头 ;
2.井字进料机构模组电气接口技术参数:一组控制信号航空插头;
3.变位机模组电气接口技术参数:一组控制信号航空插头;
4.RFID模块电气接口技术参数:一组控制信号航空插头;
5.旋转供料模组电气接口技术参数:一组控制信号航空插头号;
6.行走轴模组电气接口技术参数:一组控制信号航空插头;
7.立体仓库模组电气接口技术参数:一组控制信号航空插头;
(3)通用电气接口技术要求:
1.PLC通用电气接口技术参数:1组24V电源,3位PLC数字量输入,3位PLC数字量输出;
2.AD通用电气接口技术参数:1组24V电源,2位模拟量输入,2位模拟量输出;
3.Robot通用电气接口技术参数:1组24V电源,2位机器人数字量输入,2位机器人数字量输出;
(4)网络接口技术要求:2位RJ45接口。
1.3.14.FB体育·(中国)官方网站监控摄像头
FB体育·(中国)官方网站监控摄像头用于实时录制实验台操作视频,主要参数:
1.传感器类型:1/2.5" CMOS;
2.图像尺寸:1920×1080;
3.最小照度彩色: 0.005 Lux @ (F1.2, AGC ON);
4.镜头:2.8mm,水平视场角:98.2°;
5.调整角度水平:0°~355°;垂直:0°~75°;
6.快门:1/3s~1/100000s;
7.视频压缩标准:主码流: H.265/H,子码流: H.265/H.264/MJPEG;
8.视频压缩码率:32Kbps~8Mbps;
9.通讯接口:1个RJ45 10M/100 M自适应以太网口;
10.电源供应:DC12V±25%,Φ5.5mm圆口;
11.尺寸:Φ121×92mm;
1.3.15.气源模块
采用静音型680W 的30L空气压缩机1台,空气过滤器一个(过滤精度5微米)、油雾分离器一个(分离精度0.03微米)、减压阀一个、残压释放阀一个。
(1)实验项目
项目1:机器人认知
任务1 工业机器人本体结构介绍
任务2 工业机机器人电控柜介绍
任务3 机器人与控制柜的连线
任务4 示教器操作
项目2:机器人点动操作
任务1 了解机器人中各种坐标系
任务2 关节坐标系下点动(轴动作)
任务3 增量与非增量模式和操纵杆锁定
任务4 基坐标系下点动
任务5 工件坐标系
任务6 工具坐标系
项目3:工具坐标系与标定
任务1 工具坐标系概念
任务2 掌握工具坐标中各个数据含义
任务3 工具坐标系的标定
项目4:原点校准和程序管理
任务1 原点校准
任务2 程序结构
任务3 系统备份/加载
任务4 程序的复制
项目5:运动指令编程操作
任务1 掌握机器人程序的构成
任务2 掌握运动指令的含义
项目6:点位示教与运动编程
任务1 修改点的位置
任务2 修改程序速度
任务3 修改转弯半径
任务4 程序调用和返回
任务5 指令的复制粘贴
任务6 指令的删除
任务7 运行程序
项目7:工件坐标系与运动编程操作
任务1 工件坐标的使用场合
任务2 工件坐标的数据含义
任务3 工件坐标系三点法定义
任务4 工件坐标系的建立
任务5 工件坐标系下手动操作
任务6 工件坐标系下编程
项目8:进阶指令编程操作
任务1 偏移指令的用法
任务2 数值类型变量和对应的数学运算
任务3 延时指令的用法
任务4 自动运行时,倍率的用法
项目9:I/O编程操作
任务1 数字量I/O的配置
任务2 I/O编程调试
项目10:条件与循环编程操作
任务1 条件指令的用法
任务2 循环指令1的用法
任务3 循环指令2的用法
项目11:搬运操作
任务1 机器人快换操作
任务2 吸盘工具操作
任务3 搬运编程与调试
项目12:码垛操作
任务1 码垛操作说明介绍
任务2 码垛编程与调试
项目13:打磨操作
任务1 打磨加工分析
任务2 打磨编程与调试
项目14:写字操作
任务1 示教写字编程与调试
项目15:流水线及料库取放操作
任务1 流程分析
任务2 程序编写